About Me
I am a Robotics Engineer with a focus on autonomous navigation of mobile robots. My areas of interest include sensing and motion planning for self-driving cars, mobile robot planning, control and simulation, and real-time embedded systems.
I got my first Master's degree in Robotics Engineering from Worcester Polytechnic Institute (WPI) in the USA in 2013. Then I spent about 2 years working on the DARPA Robotics Chanllenge with Professor Taskin Padir. After the competition, I continued my graduate study as a PhD candidate in Mechanical Engineering at WPI and worked in the Autonomy, Control, and Estimation Laboratory (ACEL) under supervision of Professor Raghvendra V. Cowlagi. In early 2019, I dropped out of the PhD program due to VISA issue and concluded my study at WPI with another Master's degree in Aerospace Engineering.
Currently I work as a full-time robotics engineer and the CTO of Weston Robot. I lead a small team building mobile robot hardware and software solutions.
Personal Projects
I've been maintaining a few open-source packages for my research and hobby projects over the past a few years. Below are a few screenshots of planning-related algorithms implemented in the packages.- libgraph: C++ class templates for graph construction and search.
- libxmotion: A lightweight mobile robot motion planning and control library
- robofw: A robot firmware framework based on Zephyr
More Past Projects
I've worked on robotics projects with various types of robot hardware platforms. A few more examples of my past projects:
Previous Research
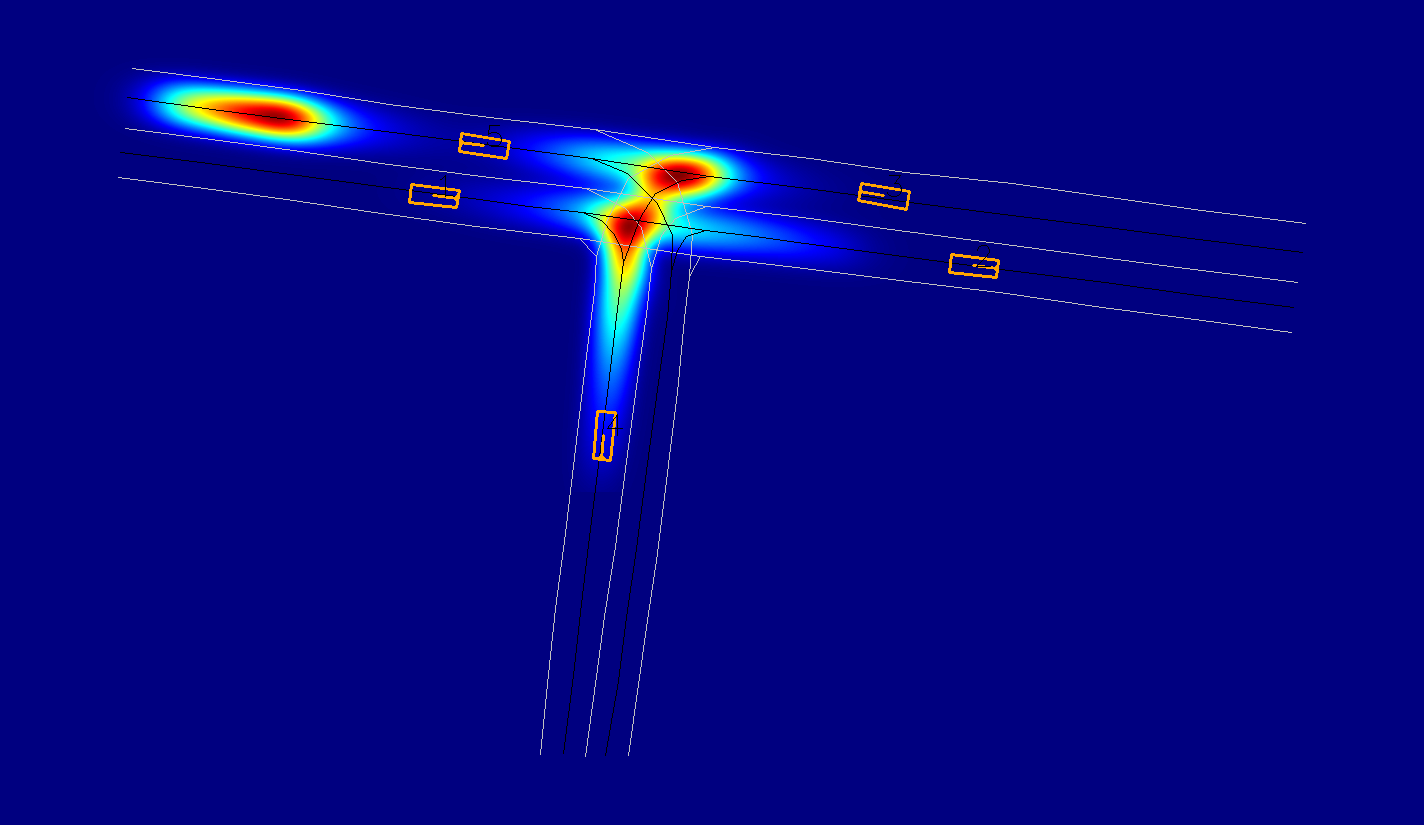
Here you can find a few research projects I've worked on during my graduate study at WPI.Motion Prediction and Planning for Connected and Automated Vehicles
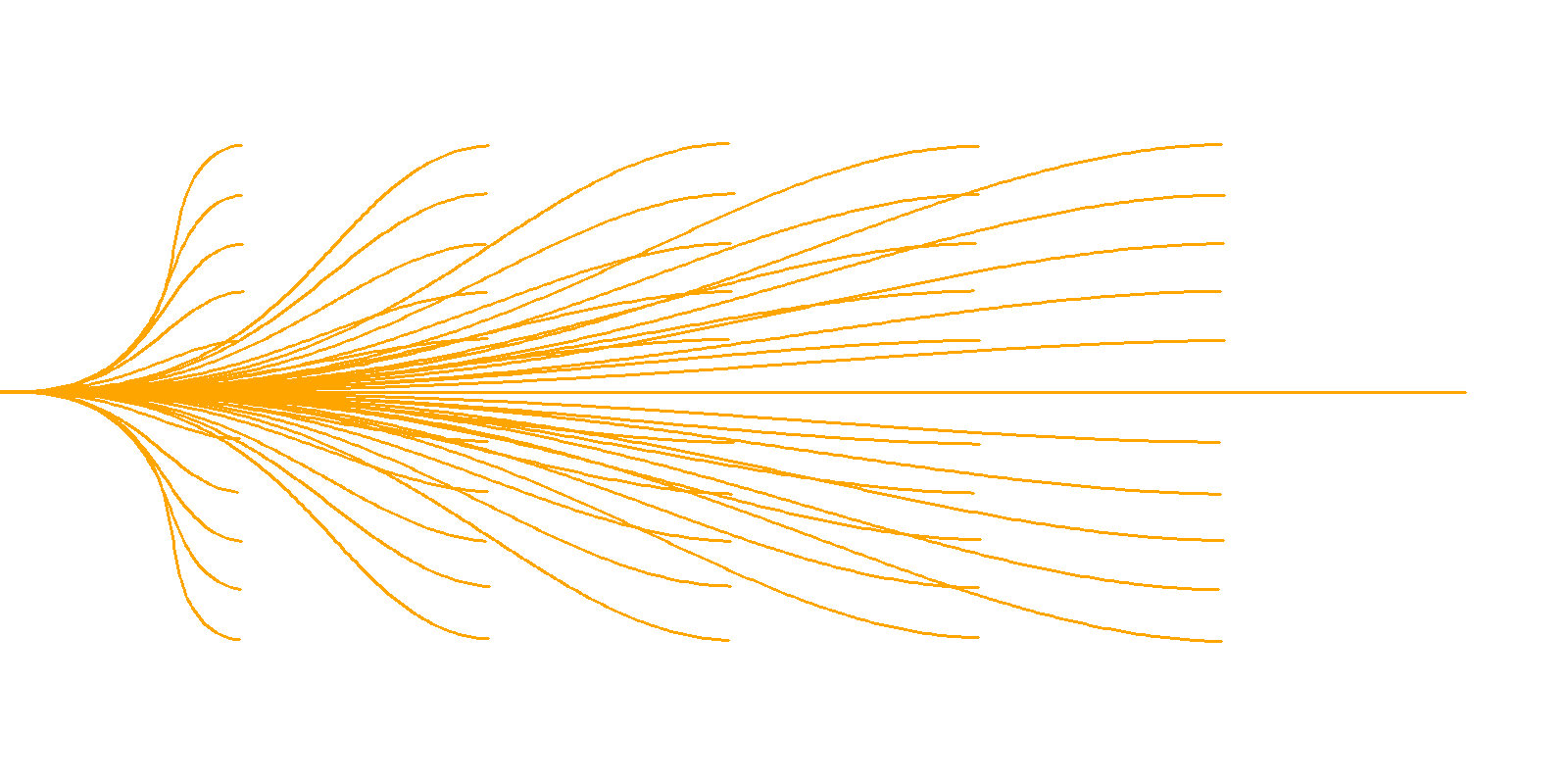
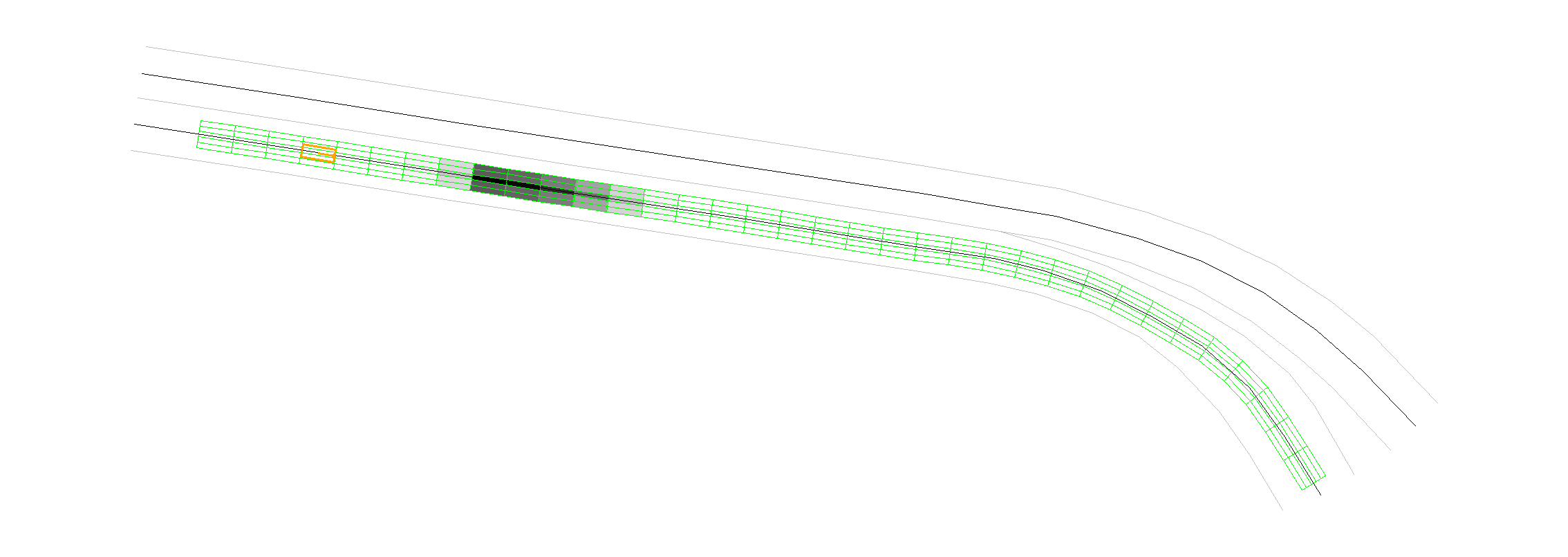
Many people anticipate 5G communication would help autonomous driving make a breakthrough and reach the next-level of autonomy. But how is V2X technology actually going to make a self-driving car safer and more efficient? What if majority of surrounding vehicles are still manually driven by human even though more and more of them are expected to be enhanced with communication capabilities? In this project, we studied existing/emerging vehicular communication technologies and investigated commonly available information that can be exchanged among vehicles. We tried to use probabilistic reachable set to predict potential occupancy by surrounding vehicles and evaluate collision risk within planning horizon of the ego (autonomous) vehicle. The goal is to selectively "listen to" vehicles that are relevant to ego vehicle's motion in order to reduce onboard computation as well as mitigating communication channel congestion in busy regions.
Path Repair and Trajecotry Optimization for Small Unmanned Aerial Vehicles
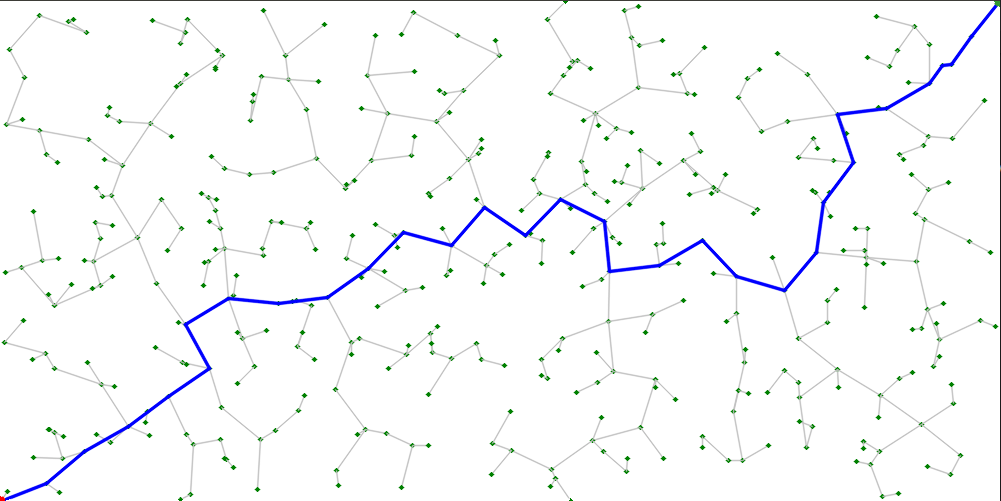
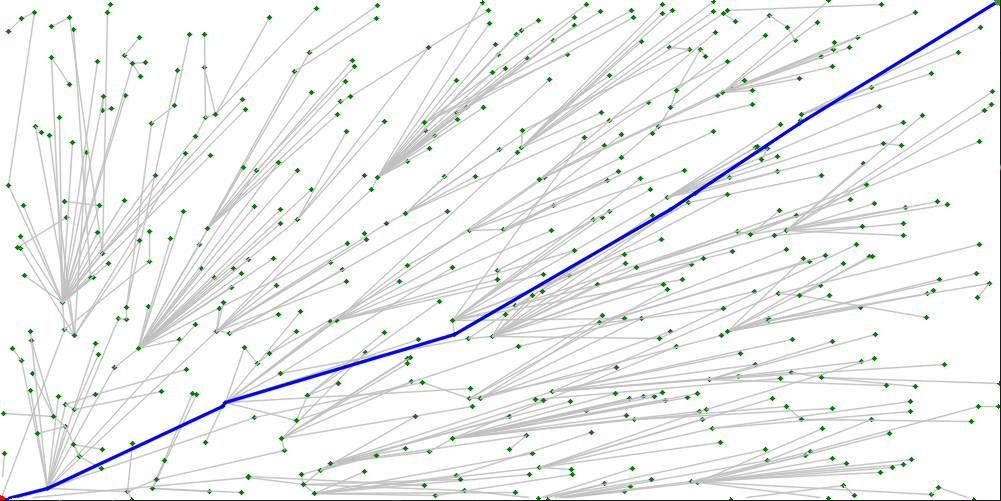
Small electric quadrotors have become commertially available for a wide range of applications, such as photography, construction site inspection and agriculture. Though these UAVs are suitable for cluttered environments by its size and manuverability, their applications are largely restricted to relatively open areas. Can we make them fly autonomously in places like warehouses, factories or densely populated urban neighbourhoods? In this project, we proposed a path repair algorithm for small UAVs equipped with FOV-limited onboard 3D sensor to efficiently navigate in large indoor environments where only a 2D map is available beforehand. The vehicle would try to take full advantage of information from the 2D map and actively look for "shortcuts" in the 3D space based on analysis with the map together with realtime sensor data.
DARPA Robotics Challenge Trials & Finals
The DARPA Robotics Challenge (DRC) was introduced after the Fukushima nuclear disaster happened in Japan, 2011. It's aimed at pushing the boundaries of technology and making life saving robotics systems available for future disasters. WPI's entry of the DRC started from the Virtual Robotics Challenge phase, in which we got the 2nd place and won an Atlas Robot built by Boston Dynamics. During the DRC Trials phase, we formed a collaborative team with CMU and successfully qualified as one of the finalists in December 2013. Our team WPI-CMU successfully finished the DRC Finals and ranked the 7th out of 23 competing teams from all over the world, in California, June 2015. Our development work invovled many aspects of robotics, such as scene segmentation and object detection, whole-body control of the humanoid robot, path and step planning, trajectory planning and control for manipulation, behavior management and human-robot interaction.